

Full Workshop 9
Description
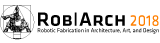
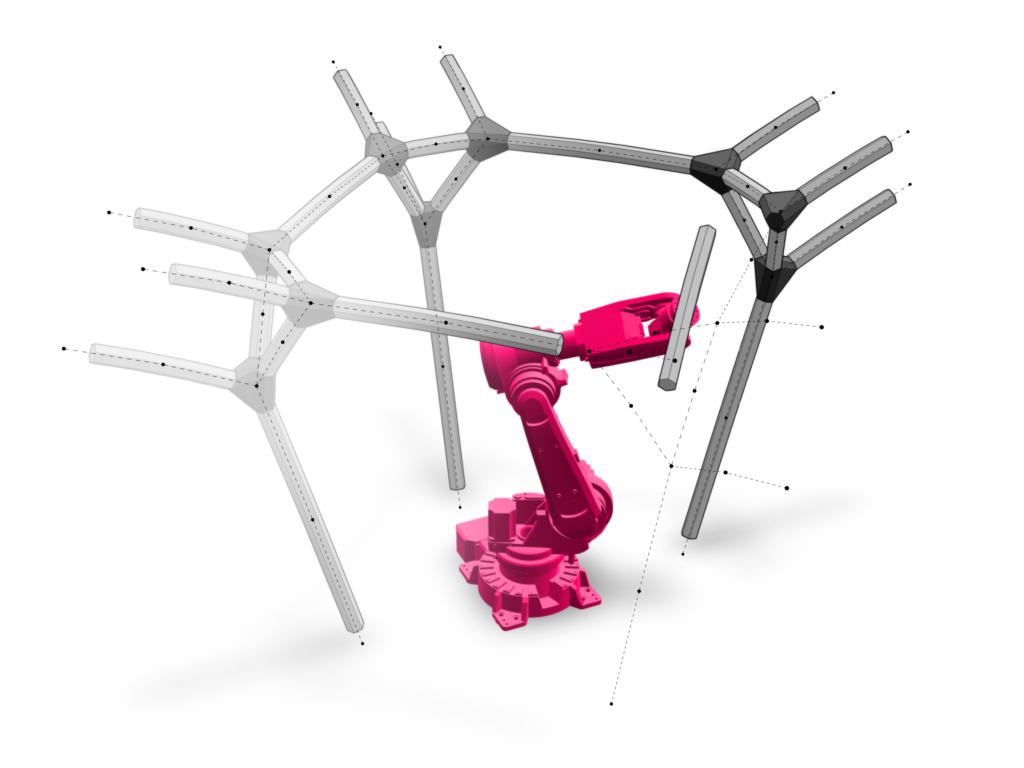
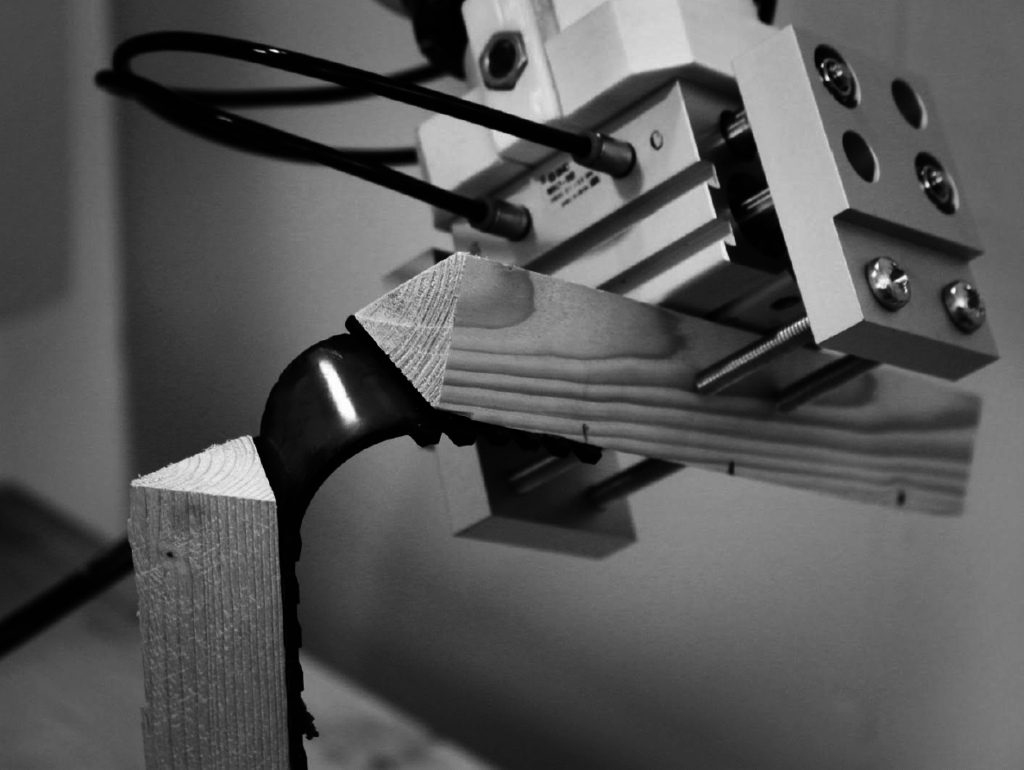
As global population grows and urbanization continues, designers are increasingly asked to provide viable solutions for urban construction in sites with complicated boundary conditions, limited staging areas, and other imposed restrictions that would typically render the site untenable. In order to engage these sites new tools and techniques are needed. This workshop will explore the utilization of pre-existing reality capture data to inform the procedural design of spatial structures that are optimized for automated assembly. Using the novel robotic control protocol Machina, currently under development at Autodesk, the workshop will demonstrate the state of the workflow and students will engage in a robotic assembly project utilizing portions of the larger workflow. The workshop will focus on robotic assembly of architectural elements.
Further information:
Instructors
Instructors:
Shajay Bhooshan (ZHCODE), Nathan King (Autodesk), Jose Luis Garcia Del Castillo Lopez (Autodesk), Hakim Hasan (Perkins & Will), and Leo Bieling (ZHOCDE)
With additional contributions from :
Gustav Fagerstrom (WPM)
Learning goals
- Uncover design implications and opportunities afforded by the introduction of automated robotic assembly with a particular focus on novel tectonic systems.
- Understand of the role of engineering design as part of an integrated DFA workflow
- Developing an operational understanding of Robot control
- Achieve a basic understanding how to program robotic motion and the actuation of various I/O and end of are tooling (Can extend into more complexity based on the workshop cohort)
- Understand the relationship of Design for Assembly (DFA) and Automated assembly in the context of building components and construction
Requirements
- Basic knowledge of Dynamo Studio w/ Machina plugin, Autodesk Maya (recommended)
- Basic knowledge of object-oriented programming (recommended)
Duration
3 days
Number of participants
12